
Danijel Skočaj, PhD
Head of the laboratory
Full Professor
danijel.skocaj@fri.uni-lj.si
+386 1 479 8225
Danijel Skočaj is a professor at the University of Ljubljana, Faculty of Computer and Information Science. He is the head of the Visual Cognitive Systems Laboratory. His main research interests lie in the fields of computer vision, machine learning, and cognitive robotics. In the framework of basic and applied research, he’s been developing and introducing new advanced methods of deep learning and computer vision for solving complex problems requiring processing of visual information. He is also interested in the ethical aspects of artificial intelligence, machine learning and robotics, and the influence of the development of these technologies on society. He’s been lecturing the courses from the fields of computer vision, cognitive robotics, and deep learning. He has led or collaborated in a number of projects from these research areas, such as EU projects, national research projects as well as industry-funded applied projects. Through the research and development applied projects he’s been facilitating the transfer of research findings into practical applications.
Research
The main research interests: computer vision, pattern recognition, deep learning, cognitive systems.
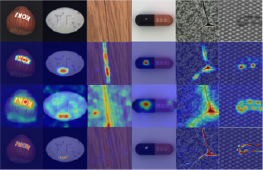
Visual anomaly detection
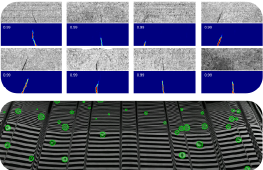
Surface defect detection
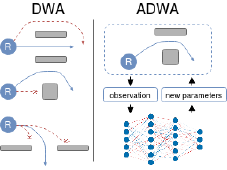
Deep reinforcement learning for navigation
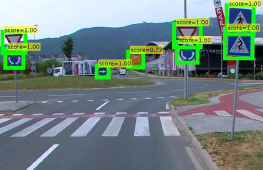
Traffic-sign detection
Main Projects
Current projects
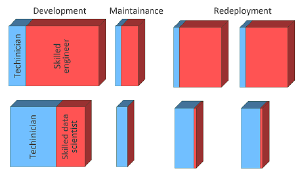
MV4.0Data-driven framework for development of machine vision solutions
Computer Vision

SMASHMachine learning for science and humanities postdoctoral program
Past projects
MV4.0Data-driven framework for development of machine vision solutions

DAViMaRAdaptive deep perception methods for autonomous surface vehicles

DIVIDDetection of inconsistencies in complex visual data using deep learning

TraPriTradition meets the future - computer vision and augmented reality for the preservation and promotion of natural and cultural heritage
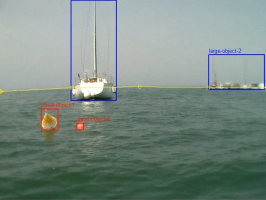
ViAMaRoRobust computer vision methods for autonomous water surface vehicles

GOSTOPBuilding Blocks, Tools and Systems for the Factories of the Future
ViLLarDMaintenance of large databases based on visual information using incremental learning
CV4footStudy and comparison of advanced computer vision methods for foot modelling in a real-world environment

HiMoDelLearning, analysis, and detection of motion in the framework of a hierarchical compositional visual architecture

CogXCognitive Systems that Self-Understand and Self-Extend

MobvisVision Technologies and Intelligent Maps for Mobile Attentive Interfaces in Urban Scenarios

VisiontrainVisiontrain - Marie Curie Research Training Network

CoSyCognitive Systems for Cognitive Assistants

CogVisCognitive Vision Systems
Selected Publications
-
ICASSP 2024, 2024
-
IEEE Robotics and Automation Letters, IEEE, 2024
-
ROSUS 2024 - Računalniška obdelava slik in njena uporaba v Sloveniji 2024, 2024
-
Pattern Recognition, 2024
-
Pattern Recognition Letters, 2024
-
Construction and Building Materials, 2023
-
Transactions on Learning Technologies, IEEE, 2023
-
IEEE/CVF Winter Conference on Applications of Computer Vision Workshops (WACVW), 2022
-
ERK, 2021
-
International Journal of Advanced Robotic Systems, 2021
-
Neural Computing and Applications, Springer, 2021
-
Computers in Industry, Elsevier, 2021
-
Pattern Recognition, Elsevier, 2021
-
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2020
-
ICPR, 2020
-
Journal of Intelligent Manufacturing, 2020
-
Transactions on Intelligent Transportation Systems, IEEE, 2019
-
Proceedings of the 12th International Conference on Computer Vision Systems, 2019
-
Proceedings of the 23rd Computer Vision Winter Workshop, 2018
-
Robotics in Education (RiE 2018), 2018
-
Proceedings of the 26th International Electrotechnical and Computer Science Conference, ERK 2017, 2017
-
Technical Report, 2017
-
International Journal of Robotics Reseach, Sage, 2017
-
Robotics in Education (RiE2017), 2017
-
Proceedings of the 22nd Computer Vision Winter Workshop, 2017
-
Danijel Skočaj, Alen Vrečko, Marko Mahnič, Miroslav Janiček, Geert-Jan M. Kruijff, Marc Hanheide, Nick Hawes, Jeremy L Wyatt, Thomas Keller, et al.Journal of Experimental & Theoretical Artificial Intelligence, 2016
-
Danijel Skočaj, Alen Vrečko, Marko Mahnč, Miroslav Janiček, Geert-Jan M. Kruijff, Marc Hanheide, Nick Hawes, Jeremy L Wyatt, Thomas Keller, et al.2016
-
IEEE International Conference on Robotics and Automation (ICRA), 2016
-
Computer Vision and Image Understanding, 2015
-
Proceedings of the 20th Computer Vision Winter Workshop, 2015, 2015
-
Proceedings of the 24th International Electrotechnical and Computer Science Conference, ERK 2015, 2015
-
6th International Conference on Robotics in Education RiE 2015, 2015
-
Proceedings of the 24th International Electrotechnical and Computer Science Conference (ERK), 2015
-
Human Computer Interaction in Information Systems 2014, 2014
-
Matjaž Majnik and Danijel SkočajProceedings of the 22nd International Electrotechnical and Computer Science Conference ERK, 2013
-
Proceedings of the 18th Computer Vision Winter Workshop, 2013
-
International Journal of Advanced Robotic Systems, 2013
-
Marko Mahnič and Danijel SkočajProceedings of 35th Jubilee International Convention on Information and Communication Technology, Electronics and Microelectronics, MIPRO 2012, 2012
-
Proceedings of the 2012 Computer Vision Winter Workshop (CVWW), 2012
-
Encyclopedia of the Sciences of Learning, Springer, 2012
-
Neurocomputing, 2012
-
Proceedings of the 2012 Computer Vision Winter Workshop (CVWW), 2012
-
IEEE/RSJ International Conference on Intelligent Robots and Systems, October 7-12, 2012, Vilamoura, Algarve, Portugal, 2012
-
Danijel Skočaj, Matej Kristan, Alen Vrečko, Marko Mahnič, Miroslav Janiček, Geert-Jan M. Kruijff, Marc Hanheide, Nick Hawes, Thomas Keller, et al.IEEE/RSJ International Conference on Intelligent Robots and Systems IROS 2011, 2011
-
Proceedings Of The Twentieth International Electrotechnical and Computer Science Conference ERK 2011, 2011
-
Proceedings of the 2011 International Conference on Adaptive and Natural Computing Algorithms (ICANNGA'11), 2011
-
Pattern Recognition, 2011
-
Proceedings of the Electrotechnical and Computer Science Conference (ERK) 2011, 2011
-
The 15th International Conference on Advanced Robotics (ICAR 2011), 2011
-
Danijel Skočaj, Miroslav Janiček, Matej Kristan, Geert-Jan M. Kruijff, Aleš Leonardis, Pierre Lison, Alen Vrečko and Michael ZillichICRA 2010 workshop ICAIR - Interactive Communication for Autonomous Intelligent Robots, 2010
-
Danijel Skočaj, Matej Kristan, Aleš Leonardis, Alen Vrečko, Miroslav Janiček, Geert-Jan M. Kruijff, Pierre Lison and Michael ZillichRSS Workshop on Learning for Human-Robot Interaction Modeling, 2010
-
Danijel Skočaj, Matej Kristan, Aleš Leonardis, Marko Mahnič, Alen Vrečko, Miroslav Janiček, Geert-Jan M. Kruijff, Pierre Lison, Michael Zillich, et al.Tenth International Conference on Epigenetic Robotics EPIROB 2010, 2010
-
Proceedings of Electrotechnical and Computer Science Conference ERK 2010, 2010
-
Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2010
-
Jeremy L. Wyatt, Alper Aydemir, Michael Brenner, Marc Hanheide, Nick Hawes, Patric Jensfelt, Matej Kristan, Geert-Jan M. Kruijff, Pierre Lison, et al.IEEE Transactions on Autonomous Mental Development, 2010
-
The 2009 IEEE/RSJ International Conference on Intelligent RObots and Systems, 2009
-
Danijel Skočaj, Matej Kristan, Alen Vrečko, Aleš Leonardis, M. Fritz, M. Stark, Bernt Schiele and S. HongengPublished Online, 2009
-
Proceedings of the Ninth International Conference on Epigenetic Robotics; Modeling Cognitive Development in Robotic Systems, Lund University Cognitive Studies, 2009
-
Proceedings of the Fourteenth Computer Vision Winter Workshop (CVWW), 2009
-
Image and Vision Computing, 2009
-
Eighteenth International Electrotechnical and Computer Science Conference, 2009
-
Proceedings of the Fourteenth Computer Vision Winter Workshop (CVWW), 2009
-
International Conference on Cognitive Systems (CogSys 2008), 2008
-
International Conference on Computer Vision Theory and Applications, 2008
-
Image vis. comput., 2008
-
Computer Vision Winter Workshop, 2008
-
Proceedings of Eight International Conference on Epigenetic Robotics, 2008
-
Danijel Skočaj, Gregor Berginc, B. Ridge, A. Štimec, Matjaž Jogan, O. Vanek, Aleš Leonardis, M. Hutter and N. HewesInternational Conference on Computer Vision Systems ICVS 2007, 2007
-
British machine vision conference 2007, 2007
-
Language and robots : proceedings of the symposium, 2007
-
Proceedings of the sixteen Electrotechnical and Computer Science Conference, ERK07, 2007
-
Nick Hawes, Aaron Sloman, Jeremy L. Wyatt, Michael Zillich, H. Jacobsson, Geert-Jan M. Kruijff, Michael Brenner, Gregor Berginc and Danijel SkočajProceedings of the Twenty-Second AAAI Conference on Artificial Intelligence, 2007
-
Pattern recogn., 2007
-
IEEE Transactions on Pattern Analysis and Machine Intelligence, 2006
-
DAGM 2005, Lect. notes comput. sci., 2005
-
Zbornik petnajste mednarodne Elektrotehniške in računalniške konference ERK 2005, 2005
-
2nd Joint IEEE International Workshop on Visual Surveillance and Performance Evaluation of Tracking and Surveillance (VS-PETS), 2005
-
Computer vision - CVWW '04 : proceedings of the 9 th Computer Vision Winter Workshop, Slovenian Pattern Recognition Society, 2004
-
Slovenian Pattern Recognition Society, 2004
-
Digital imaging in media and education : 28th workshop of the Austrian Association for Pattern Recognition (OAGM/AAPR), 2004
-
Proceedings 3rd Intl. Conference on Computer Vision Systems, ICVS 2003, Springer Berlin / Heidelberg, 2003
-
Ninth IEEE International Conference on Computer Vision ICCV 2003, 2003
-
Computer Vision -- ECCV 2002, Lecture notes in computer science, 2353, Springer, 2002
-
Vision with non-traditional sensors, 26th Workshop of the Austrian Association for Pattern Recognition (ÖAGM/AAPR), Österreichische Computer Gesellschaft, 2002
-
Proceedings of Eleventh International Electrotechnical and Computer Science Conference ERK 2002, IEEE Region 8, Slovenska sekcija IEEE, Ljubljana, 2002
-
Workshop on Cognitive Vision 2002, 2002
-
Third International Conference on 3-D Digital Imaging and Modeling: proceedings, 2001
-
Confluence of computer vision and computer graphics, (NATO science series, Series 3, High technology), Kluwer Academic Publishers, 2000
-
24th Workshop of the Austrian Association for Pattern Recognition (ÖAGM/AAPR), 2000
-
15th International Conference on Pattern Recognition, ICPR 2000, 2000
-
Pattern recognition 1997 : proceedings of the 21st Workshop of the Austrian Association for Pattern Recognition (ÖAGM/AAPR), 1997
Teaching
Teaching in 2022/23
- Deep learning
- Development of intelligent systems
- Robotics and machine perception (Robotika in računalniško zaznavanje)
- Seminar 1, Seminar 3
Old courses
- Introduction to computer science (Uvod v računalništvo)
- Scientific skills 2 (Veščine v znanstvenem delu 2, 3.st.)
- Production of multimedia content (Produkcija multimedijskih gradiv)
- Artificial intelligence (Umetna inteligenca, 3.st.)
- Algorithms and data structures 1 (Algoritmi in podatkovne strukture 1)
- Distributed intelligent software technologies (Porazdeljene inteligentne programske tehnologije)
- Data structures and algorithms (Podatkovne strukture in algoritmi (UL PeF))
- Computer science (Računalništvo (UL FPP))
All information about the courses is provided on the internal pages of UL FRI.
Awards
- 2023: Winners of the perception challange on 2th Cloth and Manipulation Challenge, part of 7th Robotic Grasping and Manipulation Competition of ICRA 2023
- 2022: Award for exceptional scientific achievement in the Republic of Slovenia in the year 2022 (ARRS).
- 2021: The award for one of ten most remarkable research achievements at the University of Ljubljana in the year 2021.
- 2021: Journal of Intelligent Manufacturing Certificate of Achievement for One of 2020’s Top Downloaded JIM Research Articles.
- 2021: Prometheus of science award for excellence in communication for 2020, Slovenian Science Foundation.
- 2020: The Golden Plaque for exceptional contributions to the development of scientific, pedagogical or artistic endeavours, and for strengthening the reputation of the University of Ljubljana.
- 2019: Special recognition for outstanding research achievement, Faculty of Computer and information science, UL.
- 2013, 2017, 2019: Best paper in the Pattern recognition session award, International Electrotechnical and Computer Science Conference ERK 2013, 2017, 2019, Portorož, Slovenia.
- 2012: Award for exceptional scientific achievement in the Republic of Slovenia in the year 2011 (ARRS).
- 2002: Best PhD paper award, 11th International Electrotechnical and Computer Science Conference ERK 2002, Portorož, Slovenia.
- 2002: Best paper award, 26th Workshop of the Austrian Association for Pattern Recognition (ÖAGM/AAPR), Graz, Austria.
Awards of my students:
- 2021: Honourably mentioned for research work of postgraduate students at UL FRI (Vitjan Zavrtanik, Domen Rački)
- 2020: Special award for research work of postgraduate students at UL, Faculty of Computer and Information Science (Matej Dobrevski, Vitjan Zavrtanik)
- 2020: Prešeren Prize for Students of the University of Ljubljana for outstanding achievements in science and art (Jaka Šircelj)
- 2013, 2019, 2021, 2022: Faculty Prešeren Prize, UL, Faculty of Computer and Information Science (Klemen Istenič, Kristian Žarn, Vid Rijavec, Valter Hudovernik)
Membership
- IEEE, Slovenia section, former chairman of the Slovenian Computer Society
- IAPR, Slovenian patter recognition Society, former chairman